Servomotor projektieren
Voraussetzung: Über I²C ist eine Adafruit 16-Channel/12Bit PWM-Platine angeschlossen, auf derem ersten PWM-Kanal ein Modellbau-Servo verkabelt ist.
Das Projekt SoftMotion Servo Example.project enthält eine Applikation, in der CODESYS SoftMotion in Verbindung mit Modellbau-Servomotoren verwendet wird. Als Kommunikationsinterface wird eine über I²C verbundene Erweiterungsplatine (Adafruit ID 815) verwendet.
Öffnen Sie das Projekt
SoftMotion Servo Example.projectund aktualisieren Sie es.Doppelklicken Sie auf Device im Gerätebaum.
Der Geräteeditor öffnet sich.
Wählen Sie in Kommunikation den Befehl Netzwerk durchsuchen.
Wenn Ihr Raspberry Pi und das Entwicklungssystem im gleichen Netzwerk sind, erscheint Ihr Raspberry Pi zur Auswahl.
Selektieren Sie es und wählen Sie den Befehl .
Die Applikation wird auf Ihrem Raspberry Pi geladen.
Starten Sie das Programm (mit F5).
Der Servomotor beginnt sich stetig von links nach rechts zu drehen. Dafür verantwortlich ist das in AS implementierte Programm
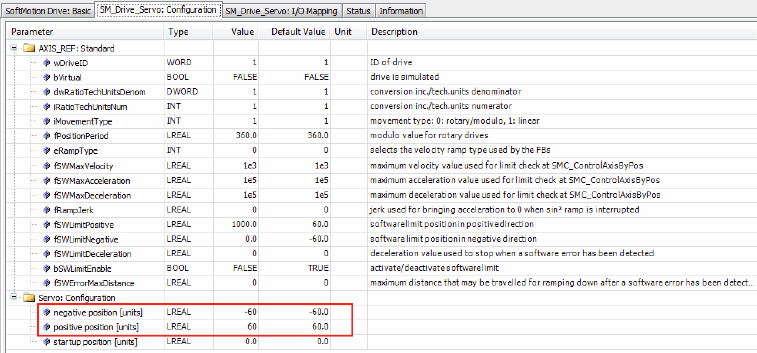
PLC_PRG. Es schaltet die Achse ein und bewegt sie dann zwischen den Positionen -60 und +60, die in der Konfiguration der AchseSM_Drive_Servoals Endlagen angegeben wurden.Die Vorgabe der Position wird über die bei Modellbau-Servos übliche PWM-Schnittstelle transportiert. Dabei wird in einem festen Takt (Default: 50Hz; Parameter des Adafruit PWM Softmotion-Geräts) ein HIGH-Puls gesendet, der zwischen 1ms und 2 ms lang ist. 1 ms steht dabei für die untere, 2 ms für die obere Endlage. Der Bewegungsbereich ist von Motortyp zu Motortyp unterschiedlich. Wenn der Motor in Winkelgrad gesteuert wird, müssen Sie den Bewegungsbereich ausmessen. Dafür fahren Sie die Endlagen (im Beispiel -60, +60) an und tragen die gemessenen Positionen im Konfigurationsbildschirm ein:
Öffnen Sie einen beliebigen Browser (eventuell auf einem Smartphone) und geben Sie die Adresse
<Netzwerk-Adresse>:8080/webvisu.htmein.Die Visualisierung öffnet sich und stellt die erzeugten Sollpositionen dar. Sie können die Geschwindigkeit steuern.